
Berita
 Rumah / Berita / Berita Industri / Bagaimanakah kelajuan putaran dan ketepatan platform berputar berongga dioptimumkan untuk aplikasi ketepatan tinggi?
Rumah / Berita / Berita Industri / Bagaimanakah kelajuan putaran dan ketepatan platform berputar berongga dioptimumkan untuk aplikasi ketepatan tinggi? Bagaimanakah kelajuan putaran dan ketepatan platform berputar berongga dioptimumkan untuk aplikasi ketepatan tinggi?
 2025.04.18
2025.04.18
 Berita Industri
Berita Industri
Mengoptimumkan kelajuan putaran dan ketepatan platform berputar berongga Untuk aplikasi ketepatan tinggi memerlukan perhatian kepada beberapa faktor reka bentuk dan kejuruteraan. Berikut adalah cara anda dapat mencapai pengoptimuman ini:
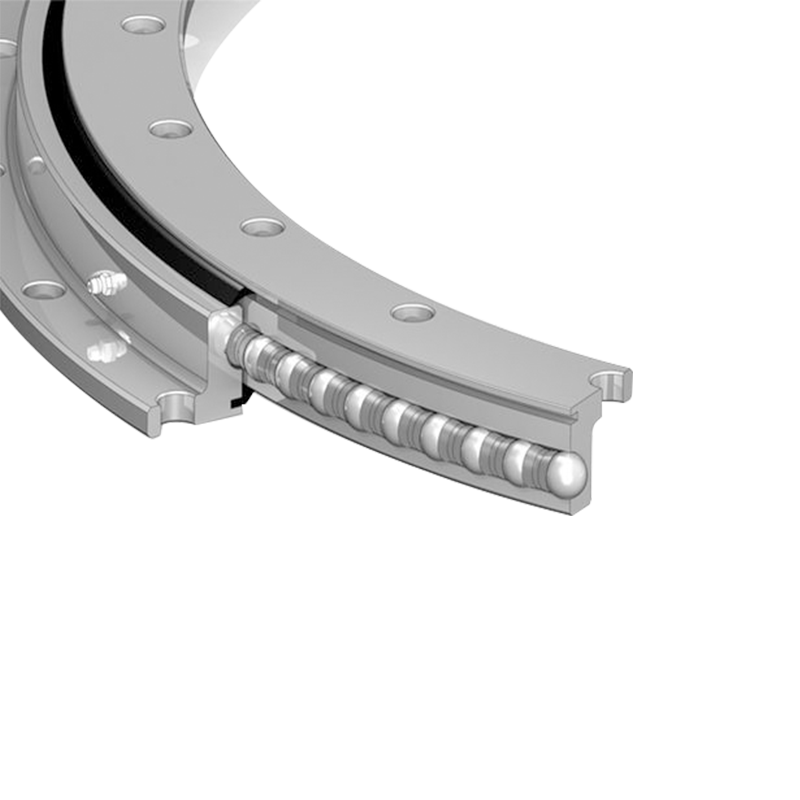
1. Galas ketepatan
-
Galas berkualiti tinggi: Pilihan galas ketepatan adalah penting dalam meminimumkan geseran dan memastikan putaran lancar. Galas seramik atau hibrid, yang dibuat dari gabungan seramik dan keluli, menawarkan ketepatan yang lebih baik, haus yang dikurangkan, dan keupayaan kelajuan yang lebih tinggi berbanding dengan galas logam tradisional.
-
Galas preload: Memohon preload ke galas boleh meminimumkan permainan paksi dan meningkatkan kestabilan platform. Ini juga membantu dalam mencapai pergerakan yang lebih tepat, terutamanya pada kelajuan putaran yang lebih tinggi.
2. Sistem pemacu
-
Servo Motors: Untuk aplikasi yang memerlukan ketepatan yang tinggi, menggunakan motor servo atau motor stepper dapat memberikan kawalan yang lebih tepat terhadap kelajuan dan kedudukan putaran. Motor ini mampu penyesuaian yang baik dan kelajuan putaran yang konsisten, yang penting dalam tugas ketepatan tinggi.
-
Sistem kawalan gelung tertutup: Sistem kawalan gelung tertutup yang terus memantau dan menyesuaikan kelajuan motor dapat mengekalkan kelajuan putaran yang dikehendaki walaupun di bawah beban yang berbeza-beza. Ini memastikan ketepatan yang konsisten sepanjang operasi platform.
-
Kotak gear atau sistem gear pengurangan: Sekiranya platform berputar perlu berputar pada kelajuan yang lebih perlahan tetapi dengan tork dan ketepatan yang tinggi, mengintegrasikan kotak gear dengan nisbah pengurangan yang sesuai boleh membolehkan kawalan halus ke atas kelajuan putaran dan ketepatan kedudukan.
3. Maklum balas dan sensor
-
Pengekod: Pengekod optik atau magnet resolusi tinggi memberikan maklum balas mengenai kedudukan dan kelajuan platform berputar, membolehkan pelarasan masa nyata untuk mengekalkan ketepatan. Pengekod ini dapat mengesan perubahan minit dalam kedudukan dan kelajuan, yang membolehkan penalaan prestasi platform.
-
Transformer Pembezaan Pembolehubah Linear (LVDT): Untuk aplikasi ketepatan yang sangat tinggi, LVDTS boleh digunakan untuk memantau sebarang perubahan dalam kedudukan atau pergerakan platform. Sensor ini boleh memberikan maklum balas tahap sub-mikron pada putaran platform.
-
Sistem maklum balas gelung tertutup: Sistem ini, yang diintegrasikan dengan motor dan pengekod, membolehkan pelarasan berterusan untuk memastikan kelajuan dan kedudukan putaran dikekalkan dengan ketepatan yang tinggi sepanjang operasi.
4. Reka bentuk struktur dan pemilihan bahan
-
Bahan berat dan kekuatan tinggi: Penggunaan bahan seperti aloi aluminium, serat karbon, atau logam ringan untuk struktur platform membantu mengurangkan inersia, yang dapat meningkatkan kelajuan dan ketepatan. Bahan -bahan ini juga menyumbang untuk mengurangkan getaran dan meningkatkan tindak balas dinamik semasa putaran.
-
Meminimumkan ubah bentuk: Memastikan integriti struktur platform adalah penting untuk mengekalkan ketepatan. Menggunakan bahan yang teguh, tegar dan reka bentuk yang teliti untuk mengurangkan flexing atau warping platform akan meminimumkan sebarang sumber kesilapan yang berpotensi semasa putaran berkelajuan tinggi.
5. Getaran Getaran
-
Sistem redaman: Getaran boleh menjadi faktor penting yang mempengaruhi ketepatan, terutamanya pada kelajuan putaran yang tinggi. Menggabungkan sistem redaman, seperti bahan viskoelastik, isolator getaran, atau peranti redaman aktif, dapat mengurangkan kesan getaran luaran dan ayunan dalaman.
-
Mengimbangi: Pengimbangan platform yang betul adalah penting, kerana ketidakseimbangan kecil boleh menyebabkan getaran yang merendahkan ketepatan. Pengimbangan dinamik semasa proses pembuatan memastikan platform beroperasi dengan lancar pada semua kelajuan putaran.
6. Pengurusan Thermal
-
Sistem Penyejukan: Kelajuan putaran yang tinggi boleh menjana haba, yang boleh menyebabkan pengembangan haba, memberi kesan kepada ketepatan. Menggunakan sistem penyejukan aktif (seperti peminat atau penyejukan cecair) atau teknik penyejukan pasif (seperti sinki haba) boleh menghalang kesan terma daripada mempengaruhi prestasi platform.
-
Pampasan terma: Sesetengah platform putar ketepatan tinggi direka dengan bahan-bahan yang mempunyai pekali rendah pengembangan haba, atau dengan sistem yang dapat mengimbangi perubahan yang disebabkan oleh suhu, memastikan platform mengekalkan ketepatan walaupun dalam keadaan suhu yang berbeza-beza.
7. Kawalan perisian dan algoritma
-
Algoritma Kawalan Lanjutan: Melaksanakan algoritma canggih yang menyesuaikan kelajuan motor, tork, dan kedudukan secara dinamik berdasarkan maklum balas masa nyata dapat mengoptimumkan kelajuan putaran dan memastikan kawalan yang tepat. Algoritma ini membantu mengurangkan kesilapan yang disebabkan oleh gangguan luaran, geseran, dan variasi beban.
-
PID (proporsional-integral-derivative) Kawalan: Gelung kawalan PID yang baik boleh memberikan kawalan yang lebih baik ke atas kelajuan dan kedudukan, membetulkan kesilapan kecil dalam masa nyata dan meningkatkan ketepatan keseluruhan. Sistem kawalan ini terus menyesuaikan parameter untuk meminimumkan kesilapan antara putaran yang dikehendaki dan sebenar.
8. Kestabilan putaran
-
Kesan gyroscopic: Kelajuan putaran yang tinggi boleh menyebabkan kesan gyroscopic yang boleh menjejaskan ketepatan pergerakan. Mengatasi kesan -kesan ini melalui reka bentuk (seperti menggunakan penolakan atau sistem penstabilan) membantu mengekalkan kestabilan platform dan ketepatan putaran.
-
Mengimbangi dinamik: Reka bentuk platform berputar berongga harus memastikan bahawa pengedaran jisim seimbang, kerana ketidakseimbangan dapat menyebabkan daya sentrifugal yang memberi kesan negatif terhadap ketepatan dan operasi lancar pada kelajuan tinggi.
9. Pelinciran
-
Sistem Pelinciran Lanjutan: Pelinciran yang betul adalah penting untuk meminimumkan geseran dan memakai pada komponen bergerak, terutamanya pada kelajuan putaran yang tinggi. Menggunakan pelincir berkualiti tinggi dan menggunakannya dengan cara yang terkawal (mis., Melalui sistem pelinciran automatik) memastikan prestasi dan panjang umur yang konsisten.
-
Gris vs minyak: Untuk aplikasi berkelajuan tinggi, memilih pelinciran yang betul-minyak atau gris yang berdasarkan kelikatan, kestabilan terma, dan keserasian dengan persekitaran operasi adalah penting untuk mengekalkan gerakan yang lancar dan tepat.
10. Integrasi dengan sistem luaran
-
Penyegerakan dengan peralatan lain: Dalam sesetengah aplikasi, platform berputar berongga mungkin perlu disegerakkan dengan jentera lain atau lengan robot. Memastikan keserasian dan penyegerakan dengan sistem luaran (seperti penghantar atau mesin CNC) melalui protokol komunikasi atau kawalan rangkaian membantu mengekalkan pergerakan dan operasi yang tepat.

Jiangsu Manchen Transmission Technology Co., Ltd. cemerlang dalam mewujudkan galas slewing, yang boleh dipercayai, dan tepat untuk industri yang pelbagai, terus berinovasi untuk memenuhi standard tertinggi dan mencari peluang kerjasama. Pembekal galas yang boleh dipercayai dan mantap di China.
Pautan cepat
Pautan produk
Hubungi kami
-
Address:No. 8, Jalan Nanqiu, Bandar Huangtu, Jiangyin City, China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
